 微信扫一扫,关注公众号
微信扫一扫,关注公众号

科技行者

算力行者
见证连接与计算的「力量」
梦境造世者:UCLA团队让模拟器世界变成现实画面的神奇魔法
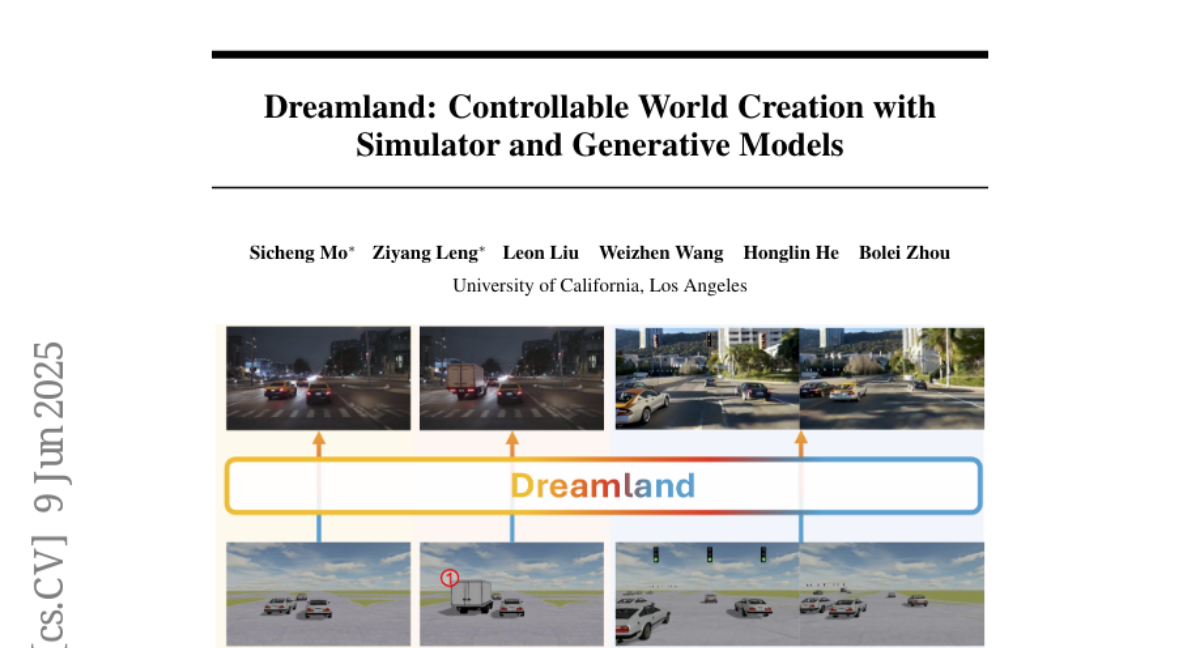
想象一下,如果你能把电脑游戏里的虚拟世界瞬间变成电影级别的真实画面,那会是怎样一种体验?这个听起来像科幻小说的想法,现在真的被加州大学洛杉矶分校(UCLA)的研究团队实现了。他们开发了一个叫做"Dreamland"的系统,就像一位神奇的造梦师,能够把呆板的电脑模拟画面变成栩栩如生的真实世界。
这项突破性研究发表于2025年6月,由UCLA的莫思诚、冷紫阳、Leon Liu、王维珍、何鸿林和周博磊等研究者共同完成。有兴趣深入了解的读者可以通过项目网站https://metadriverse.github.io/dreamland/获取完整的研究成果和代码。
说到底,这项研究就像是在解决一个困扰了科技界很久的老大难问题。你知道,现在的电脑模拟器虽然能精确计算物理规律,但画面效果往往像上世纪90年代的电子游戏一样粗糙。而那些能生成逼真画面的人工智能系统,虽然看起来很美,却往往不听指挥,你想让它画个特定的场景,它可能给你来个完全不相关的内容。
这就好比你有一个极其精确的建筑师,能够完美设计房子的结构和功能,但他画出来的图纸却像小孩子的涂鸦。同时,你还有一个艺术天才,能画出照片级别的美丽房屋,但他完全不按你的要求来,想画什么就画什么。Dreamland的绝妙之处就在于,它成功地让这两个"人"携手合作,既保持了建筑师的精确性,又发挥了艺术家的创造力。
具体来说,这个系统主要解决的是自动驾驶训练中的一个关键难题。训练自动驾驶汽车就像教小孩学开车,你需要让它在各种场景中练习。但真实世界中练习既危险又昂贵,而现有的电脑模拟器虽然安全,但画面太假,就像让孩子在卡通世界里学开车,到了真实世界就不适应了。
研究团队的创新之处在于创造了一种叫做"分层世界抽象"的巧妙方法。想象一下制作一部动画电影,你需要分别绘制背景、角色和前景,然后把它们巧妙地组合在一起。Dreamland也是这样工作的,它把整个驾驶场景分成三个"图层":交通参与者图层(包括汽车、行人等)、道路布局图层(包括马路、人行道等)和背景图层(包括建筑物、天空等)。
更厉害的是,这个系统采用了三步走的策略。首先,精确的物理模拟器负责"搭建舞台",确保所有的车辆位置、道路结构都符合物理规律。接着,一个"场景编辑师"负责把模拟器生成的简陋画面改造成更接近真实世界的样子。最后,强大的图像生成模型像一位顶级画家,把这些信息转化成令人惊叹的真实画面。
研究团队还构建了一个专门的数据集叫做D3Sim,包含了大约60000个样本,就像为这个系统准备了一本超级详细的"教科书"。这个数据集记录了各种驾驶场景在模拟器中的样子和在真实世界中的样子,让系统能够学会如何在两者之间进行转换。
实验结果令人振奋。与现有的最先进方法相比,Dreamland在图像质量方面提升了50.8%,在可控性方面提升了17.9%。更重要的是,当研究团队用这个系统训练的数据来训练人工智能模型时,这些模型在真实世界测试中的表现提升了3.9个百分点。这意味着,用Dreamland生成的训练数据确实能帮助人工智能更好地理解和应对真实世界的情况。
这项研究的意义远不止于技术层面的突破。想象一下未来的可能性:电影制片人可以用它快速生成各种复杂的驾驶场景,而不需要实地拍摄;游戏开发者可以轻松创造出既美观又符合物理规律的虚拟世界;自动驾驶研究人员可以在安全的环境中测试各种危险场景,比如突然出现的行人或恶劣天气条件。
研究团队还展示了系统的多样化应用能力。比如,你可以告诉系统"把这个场景改成下雨的柏林街道",它就能保持原有的车辆位置和道路布局,但把整个画面风格转换成雨中的德国城市。或者你可以说"把那辆卡车换成一辆跑车",系统就能精确地进行这种编辑操作。
最有趣的是,Dreamland还能生成一些在现实中很难或很危险收集的场景,比如多车相撞的瞬间或极端天气条件下的驾驶场景。这对于训练更安全、更可靠的自动驾驶系统具有重要意义。
系统的设计哲学体现了研究团队的深度思考。他们认识到,完美的解决方案不是要完全抛弃现有的技术,而是要让不同的技术发挥各自的优势。物理模拟器擅长精确计算,那就让它专门负责"讲道理"的部分;生成式人工智能擅长创造美丽的画面,那就让它专门负责"造梦"的部分。通过巧妙的设计,两者的优势得到了完美结合。
从技术实现的角度来看,Dreamland的每个组件都经过了精心设计。第一阶段的模拟阶段使用了MetaDrive模拟器,能够精确重现真实世界的驾驶场景。第二阶段的转换过程采用了指令式编辑模型,就像有一个懂得艺术的助手,能够理解你的要求并进行相应的修改。第三阶段的生成过程则使用了Flux等先进的图像生成模型,确保最终输出的画面质量达到专业级别。
值得一提的是,这个系统具有很强的可扩展性。随着未来更强大的生成模型出现,Dreamland可以很容易地集成这些新技术,而不需要重新设计整个框架。这种前瞻性的设计理念确保了系统的长期价值。
研究团队还进行了详尽的对比实验。他们将Dreamland与多个现有方法进行了比较,包括BEVGen、BEVControl、MagicDrive等。结果显示,Dreamland在几乎所有评价指标上都取得了显著优势。特别是在用户研究中,95.4%的参与者认为Dreamland生成的图像质量更好,71.4%的参与者认为它在遵循模拟器条件方面表现更佳。
更令人惊喜的是,研究团队还开发了Dreamland的视频版本,能够生成连续的、高质量的驾驶场景视频。这意味着不仅可以生成单张图片,还能创造出流畅的动态场景,就像制作一部关于自动驾驶的纪录片一样。
从数据处理的角度来看,D3Sim数据集的构建也是一项了不起的工程。研究团队基于nuPlan数据集,使用ScenarioNet工具在MetaDrive模拟器中重建了超过20000个数字孪生场景。每个场景都经过精心标注,包括深度信息、语义分割、实例分割等多种条件信息。这种多模态的数据表示为系统的训练提供了丰富的信息来源。
在实际应用测试中,研究团队发现Dreamland生成的数据能够显著改善下游任务的性能。他们使用InternVL2-8B模型进行了视觉问答任务的测试,结果显示使用Dreamland数据训练的模型在真实世界测试集上的准确率提升了3.9个百分点。这个结果强有力地证明了Dreamland生成数据的实用价值。
系统的另一个独特优势是其灵活的控制能力。用户可以根据需要选择哪些部分保持不变,哪些部分可以进行创意改变。比如,你可以要求保持所有车辆和道路的位置不变,只改变背景环境,从晴朗的洛杉矶街道变成雨夜的东京街头。这种精细的控制能力为各种应用场景提供了极大的灵活性。
研究团队还验证了系统在不同模拟器上的通用性。除了MetaDrive,他们还测试了系统在MetaUrban模拟器上的表现,结果显示Dreamland具有很好的跨平台适应能力。这意味着无论使用哪种模拟器,都可以享受到Dreamland带来的画质提升效果。
从计算效率的角度来看,虽然Dreamland增加了一个编辑模型,导致推理时间有所增加,但研究团队通过优化设计最大化了效果与效率的平衡。而且,与从头训练一个全新的生成模型相比,Dreamland的适应成本要低得多,因为它可以直接利用现有的预训练模型。
这项研究的影响远远超出了自动驾驶领域。在虚拟现实、游戏开发、电影制作、建筑可视化等多个领域,都存在类似的需求:既要精确的控制,又要逼真的视觉效果。Dreamland提供的混合方法为解决这类问题开辟了新的思路。
更深层次来看,这项研究体现了人工智能发展的一个重要趋势:不是用一个万能的模型解决所有问题,而是让不同的专业化模型发挥各自的优势,通过巧妙的组合实现1+1>2的效果。这种"分工合作"的思路可能为未来的人工智能系统设计提供重要启发。
研究团队在论文中也诚实地指出了当前系统的局限性。比如,需要高质量的模拟器和真实世界配对数据,这些数据的标注成本相对较高。另外,增加的编辑模型确实会带来额外的计算开销。但正如研究团队所说,这些局限性并不妨碍系统的实用价值,而且随着技术的进步,这些问题都有望得到解决。
说到底,Dreamland的成功在于它没有试图重新发明轮子,而是巧妙地将现有的最佳技术组合在一起,创造出了超越各部分之和的整体效果。这种务实而创新的方法论值得我们在解决其他复杂问题时借鉴。
归根结底,Dreamland代表了一种新的可能性:我们不再需要在精确控制和视觉质量之间做出艰难选择,而是可以同时拥有两者。这不仅是技术上的突破,更是思维方式的转变。正如研究团队所展望的,这种混合方法可能为更广泛的人工智能应用开辟新的道路,让虚拟世界与现实世界的边界变得越来越模糊。对于普通人来说,这意味着未来我们可能会看到更加逼真的虚拟内容,体验到更加沉浸式的数字世界,而这一切的背后,正是像Dreamland这样的创新技术在默默发挥作用。


好文章,需要你的鼓励

至顶头条

科技行者

码客人生

奇客Solidot

高飞的电子替身

奇客情报站

利用大语言模型探索科学创新前沿:南洋理工大学团队开发检测学术新颖性的突破性方法
这项研究利用大语言模型解决科学新颖性检测难题,南洋理工大学团队创新性地构建了闭合领域数据集并提出知识蒸馏框架,训练轻量级检索器捕捉想法层面相似性而非表面文本相似性。实验表明,该方法在市场营销和NLP领域显著优于现有技术,为加速科学创新提供了有力工具。

un?CLIP:通过反转unCLIP来提升CLIP模型的视觉细节捕捉能力
un?CLIP是一项创新研究,通过巧妙反转unCLIP生成模型来增强CLIP的视觉细节捕捉能力。中国科学院研究团队发现,虽然CLIP在全局图像理解方面表现出色,但在捕捉细节时存在不足。他们的方法利用unCLIP生成模型的视觉细节表示能力,同时保持与CLIP原始文本编码器的语义对齐。实验结果表明,un?CLIP在MMVP-VLM基准、开放词汇语义分割和视觉中心的多模态任务上显著优于原始CLIP和现有改进方法,为视觉-语言模型的发展提供了新思路。

角色扮演能力大考验:里尔大学研究团队开发的大语言模型角色扮演评估新标准
这项研究介绍了RPEval,一个专为评估大语言模型角色扮演能力而设计的新基准。研究团队从法国里尔大学开发的这一工具专注于四个关键维度:情感理解、决策制定、道德对齐和角色一致性,通过单轮交互实现全自动评估。研究结果显示Gemini-1.5-Pro在总体表现上领先,而GPT-4o虽在决策方面表现出色,但在角色一致性上存在明显不足。这一基准为研究人员提供了一个可靠、可重复的方法来评估和改进大语言模型的角色扮演能力。

LegalSearchLM:北大团队打造突破性法律案例检索新方法,将案例检索重新定义为法律要素生成
这篇论文介绍了LegalSearchLM,一种创新的法律案例检索方法,将检索任务重新定义为法律要素生成。研究团队构建了LEGAR BENCH数据集,涵盖411种犯罪类型和120万案例,并开发了能直接生成关键法律要素的检索模型。实验表明,该模型在准确率上超越传统方法6-20%,且在未见犯罪类型上展现出强大泛化能力。这一突破为法律专业人士提供了更高效、精准的案例检索工具。

利用大语言模型探索科学创新前沿:南洋理工大学团队开发检测学术新颖性的突破性方法

un?CLIP:通过反转unCLIP来提升CLIP模型的视觉细节捕捉能力

角色扮演能力大考验:里尔大学研究团队开发的大语言模型角色扮演评估新标准

LegalSearchLM:北大团队打造突破性法律案例检索新方法,将案例检索重新定义为法律要素生成
