 微信扫一扫,关注公众号
微信扫一扫,关注公众号

科技行者

算力行者
见证连接与计算的「力量」
清华大学团队打造超级机器人管家:一个会自己"思考"的全能型人形机器人诞生了!
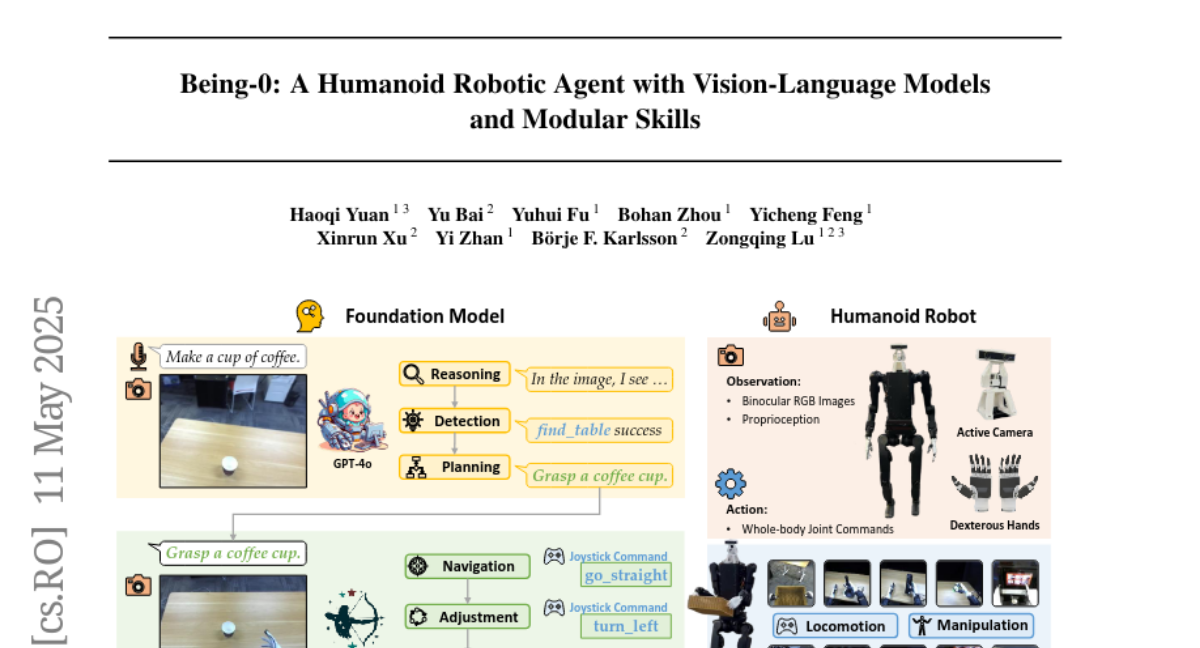
这项由清华大学、北京人工智能研究院以及BeingBeyond公司联合完成的研究发表于2025年5月,论文标题为《Being-0: A Humanoid Robotic Agent with Vision-Language Models and Modular Skills》。感兴趣的读者可以通过arXiv:2503.12533v2访问完整论文。
你有没有想过,未来的机器人管家会是什么样子?不是那种只会扫地或者简单对话的机器人,而是真正能像人类一样思考、规划并完成复杂任务的智能助手。清华大学的研究团队刚刚向我们展示了这样一个令人惊叹的成果——他们开发出了一个名为Being-0的人形机器人系统,这个机器人不仅长着人的样子,更重要的是,它真的具备了类似人类的思维能力。
Being-0就像是一个拥有完整大脑、眼睛和双手的智能助手。它能够理解你的语言指令,比如"给我泡杯咖啡",然后自己制定详细的行动计划:先找到杯子,再走到咖啡机前,把杯子放好,选择咖啡类型,等待制作完成。整个过程中,它会像人一样观察环境,遇到障碍时调整策略,甚至在找不到物品时主动搜索。
这个机器人系统最神奇的地方在于它的"三层大脑"结构。最顶层是一个强大的基础模型(类似于ChatGPT这样的AI大脑),负责理解任务和制定总体策略。中间层是一个叫做"连接器"的创新模块,它就像人类的小脑一样,负责将大脑的想法转化为具体的身体动作。最底层则是各种专门的技能模块,就像人类掌握的走路、抓取、操作等基本能力。
**一、机器人的"身体构造"与挑战**
Being-0使用的是一台身高1.8米的Unitree H1-2人形机器人,这台机器人拥有41个关节,就像人类一样可以灵活运动。它的双手是精密的多指灵巧手,能够进行复杂的抓取和操作动作。更有趣的是,它的"眼睛"——一对双目摄像头——安装在可以转动的"脖子"上,能够主动调整视角来观察环境,就像人类会转头寻找物品一样。
但是,让人形机器人真正像人一样工作并不简单。传统的机器人要么只能执行预设的动作序列,要么需要人类远程操控每一个细节。而且,不同于那些有轮子的机器人可以精确地移动到指定位置,人形机器人用两条腿走路本身就是一个充满挑战的任务。它需要不断保持平衡,步伐会有细微的偏差,这就意味着机器人很难精确地按照预定路线到达目标位置。
更复杂的是,当机器人需要完成"制作咖啡"这样的长期任务时,它必须将这个大任务分解成多个小步骤:导航到桌子、抓取杯子、导航到咖啡机、放置杯子、操作咖啡机等等。每一个步骤都可能因为环境变化或执行偏差而需要调整,这就要求机器人具备实时的判断和适应能力。
**二、革命性的"三层大脑"架构**
面对这些挑战,研究团队设计了一个极其巧妙的解决方案。他们没有试图用一个万能的AI来处理所有问题,而是创建了一个分工明确的"三层大脑"系统。
最顶层的基础模型就像是机器人的"战略指挥官"。它负责理解人类的指令,分析当前环境,并制定总体的行动策略。比如,当你说"给我泡杯咖啡"时,这个指挥官会分析:"首先需要找到杯子,然后去咖啡机那里,接着操作咖啡机制作咖啡。"这一层使用的是GPT-4o这样的先进语言模型,具备强大的理解和推理能力。
中间层的"连接器"模块则是整个系统的核心创新。它就像是机器人的"执行经理",负责将指挥官的战略转化为具体可执行的动作指令。当指挥官说"去找杯子"时,连接器会观察当前环境,判断杯子在哪个方向,然后给出具体的移动指令:"向左转30度"、"前进2米"、"向右调整10度"等等。这个连接器使用了一个轻量级的视觉-语言模型,经过专门训练来理解机器人的视角和空间关系。
最底层的技能模块库就像是机器人的"肌肉记忆"。这里存储着各种基础技能:稳定行走、精确抓取、物品放置、按钮操作等等。每个技能都经过大量训练,能够在各种情况下稳定执行。当连接器发出"抓取杯子"的指令时,相应的抓取技能就会激活,自动处理手部的精细动作控制。
**三、智能"连接器"的神奇功能**
这个连接器模块的设计可以说是整个系统的点睛之笔。研究团队发现,直接让大型AI模型控制机器人存在几个严重问题:反应太慢、对3D空间理解不准确、容易在复杂环境中"迷路"。
为了解决这些问题,他们开发了一个专门针对机器人控制优化的轻量级AI模型。这个模型接受了大量机器人第一人称视角图像的训练,学会了从机器人的角度理解世界。它知道如何判断物品的距离和方向,能够预测接下来应该执行什么动作,甚至可以在找不到目标物品时主动搜索。
连接器的一个重要功能是"视觉导航"。当机器人需要走到某个物品前时,连接器会分析摄像头看到的画面,找到目标物品,计算它的相对位置,然后规划一条路径。如果目标物品不在视野中,连接器会让机器人转动头部或身体进行搜索,就像人类寻找东西时会四处张望一样。
更巧妙的是,连接器还具备"姿态调整"功能。由于人形机器人走路时会有轻微的偏差,它可能会以一个不太合适的角度接近目标物品。连接器能够识别这种情况,并指导机器人进行微调,确保机器人最终能以最佳姿态完成后续的操作任务。
**四、模块化技能库的构建**
Being-0的技能库就像是一个经验丰富工匠的工具箱,里面装满了各种专门的"工具"。研究团队将机器人的能力分为两大类:运动技能和操作技能。
运动技能主要负责机器人的移动。团队使用强化学习技术训练出了一个稳定的步行控制器,这个控制器可以根据"操纵杆指令"让机器人朝不同方向移动:直行、后退、左转、右转、侧步等等。这就像是给机器人安装了一个虚拟的游戏手柄,连接器可以通过发送相应的指令来控制机器人的移动。
操作技能则更加复杂和多样化。研究团队使用了一种叫做"示教学习"的方法来获取这些技能。他们让人类操作员戴上Apple Vision Pro头显设备,在虚拟现实环境中演示各种操作动作。头显会捕捉人类的头部、手腕和手指动作,然后将这些动作转换为机器人可以执行的指令序列。
通过这种方法,团队收集了大量的操作技能:抓取瓶子、放置物品、操作篮子、使用咖啡机、下棋、玩积木等等。每个技能只需要50到200个演示样本就能训练完成,这大大提高了技能获取的效率。更重要的是,每个技能都有自然语言描述,比如"抓取咖啡杯"、"放置物品到桌上",这样连接器就能根据当前需要选择合适的技能。
**五、主动视觉系统的重要作用**
Being-0的一个突出特点是它具备"主动视觉"能力。不同于那些摄像头固定不动的机器人,Being-0可以像人类一样主动调整视角来观察环境。
这种能力的重要性可以通过一个简单的例子来理解。当你在厨房找东西时,你会自然地转头看向不同的方向,甚至俯身查看桌面或抬头看向高处。Being-0也具备类似的能力。它的摄像头安装在一个可以上下左右转动的"脖子"上,能够根据任务需要调整观察角度。
研究团队发现,这种主动视觉能力对于机器人的性能至关重要。在导航任务中,机器人需要将视线调整到合适的角度来寻找目标物品。在操作任务中,机器人需要俯视桌面来准确定位物品位置。如果使用固定角度的摄像头,机器人在很多情况下都无法获得足够的视觉信息来完成任务。
实验结果显示,配备主动视觉系统的Being-0在各种任务中都达到了完美的成功率,而使用固定摄像头的版本在许多任务中都会失败。这证明了主动视觉对于人形机器人系统的重要性。
**六、复杂任务的执行过程**
让我们通过一个具体的例子来看看Being-0是如何工作的。假设你对它说:"给我制作一杯咖啡。"
首先,顶层的基础模型会分析这个指令,理解这是一个需要多个步骤的复杂任务。它会生成一个大致的计划:找到杯子、拿起杯子、找到咖啡机、操作咖啡机制作咖啡。
接下来,基础模型会发出第一个子任务指令:"找到并抓取杯子。"连接器接收到这个指令后,开始分析当前的视觉输入。它会在画面中搜索杯子,如果没有看到,就会指导机器人转动头部或身体进行搜索。
一旦发现杯子,连接器会计算杯子的位置和距离,然后生成具体的导航指令。机器人开始向杯子走去,连接器持续监控前进过程,根据需要调整方向和速度。当机器人接近杯子时,连接器会评估当前的位置和姿态,如果发现角度不太合适,就会指导机器人进行微调。
当机器人处于合适位置后,连接器会激活"抓取杯子"技能。这个技能会控制机器人的手臂和手指,精确地抓取杯子。抓取完成后,连接器会向基础模型报告任务完成。
基础模型收到报告后,会发出下一个指令:"找到咖啡机并放置杯子。"整个过程重复进行,连接器负责导航到咖啡机、放置杯子、操作咖啡机选择咖啡类型、确认制作等等。
在整个过程中,如果遇到意外情况(比如杯子被移动了位置,或者咖啡机前有障碍物),连接器能够实时调整策略,甚至向基础模型请求新的指令。这种分层协作的方式使得机器人能够灵活应对各种复杂情况。
**七、实验验证与性能表现**
为了验证Being-0的能力,研究团队在一个面积400平方米的大型办公环境中进行了全面测试。这个环境包含多个办公隔间、会议室、接待区域和走廊,就像一个真实的工作场所。
团队设计了五类不同复杂程度的任务来测试机器人的能力。最简单的是"取物任务",比如"去桌子那里拿一个瓶子"。稍复杂的是"递送任务",比如"把篮子拿到桌子上"。最复杂的是"制作咖啡"相关任务,包括准备咖啡、制作咖啡和递送咖啡,这些任务需要机器人完成多个步骤的复杂操作。
实验结果令人印象深刻。在最复杂的长期任务中,Being-0达到了平均84.4%的成功率。更重要的是,与没有连接器模块的基础版本相比,完整的Being-0系统在大多数任务中都实现了从0%到80-90%的巨大性能提升。
特别值得关注的是效率方面的改进。由于连接器模块可以在本地设备上运行,不需要频繁访问云端的大型AI模型,Being-0的导航速度比完全依赖云端AI的系统快了4.2倍。这意味着机器人能够更快速、更流畅地执行任务。
研究团队还进行了详细的消融实验,验证了系统各个组件的重要性。他们发现,连接器模块对于系统性能至关重要,特别是在需要精确定位和姿态调整的任务中。主动视觉系统同样不可或缺,没有它机器人在很多情况下都无法获得足够的环境信息。
**八、技术创新与突破意义**
Being-0系统的技术创新主要体现在几个方面。首先是分层架构的设计理念。不同于之前试图用单一AI模型解决所有问题的方法,Being-0将认知、决策和执行分离到不同层次,每一层都针对特定任务进行优化。这种设计不仅提高了系统的整体性能,还增强了可扩展性和维护性。
连接器模块的设计是另一个重要创新。这个模块专门针对机器人的空间理解和动作规划进行了优化,填补了高级认知和低级控制之间的空白。它不仅能够理解自然语言指令,还能将这些指令转化为机器人可以执行的具体动作序列。
模块化技能库的构建方法也具有重要意义。通过将复杂的机器人控制分解为可复用的技能模块,系统能够快速获得新的能力。每个技能只需要相对少量的训练数据就能掌握,这大大降低了系统开发和维护的成本。
从更广泛的角度来看,Being-0代表了人形机器人发展的一个重要里程碑。它证明了通过合理的系统架构设计,可以让机器人具备类似人类的综合能力:理解语言、规划行动、灵活移动、精确操作。这为未来开发更加智能和实用的机器人系统提供了重要的技术路径。
**九、应用前景与未来发展**
Being-0系统的成功开发为机器人在各个领域的应用开辟了新的可能性。在家庭服务领域,这样的机器人可以成为真正的智能管家,不仅能够完成清洁、整理等基础工作,还能够协助烹饪、照料老人、陪伴儿童等更复杂的任务。
在工业和商业环境中,Being-0这样的系统可以在仓库、工厂、医院、酒店等场所发挥重要作用。它们能够理解复杂的工作指令,在动态环境中自主导航,与人类同事协作完成各种任务。
教育和科研领域也将从这项技术中受益。机器人可以作为教学助手,帮助演示实验过程,协助学生完成项目。在科研环境中,它们可以协助科学家进行实验操作,处理危险物质,或者在恶劣环境中收集数据。
不过,研究团队也坦诚地指出了当前系统的局限性。Being-0目前主要在平地环境中工作,还不具备爬楼梯、蹲下、跳跃等更复杂的运动能力。此外,系统仍然需要依赖云端的大型AI模型进行高级决策,这在一定程度上限制了其完全自主的工作能力。
未来的发展方向包括增强机器人的运动能力,使其能够在更多样化的环境中工作。同时,研究团队也在努力开发更加轻量化的AI模型,希望能够将更多的智能决策能力集成到机器人本体中,减少对外部计算资源的依赖。
说到底,Being-0的意义不仅在于它展示了当前机器人技术的最高水平,更重要的是它为我们描绘了一个机器人与人类和谐共存的未来图景。在这个未来中,机器人不再是简单的工具,而是能够理解我们需求、协助我们工作、甚至与我们交流的智能伙伴。虽然这个未来还没有完全到来,但Being-0已经让我们看到了实现这一愿景的可能性。
这项研究也提醒我们,真正智能的机器人系统需要的不仅仅是先进的AI算法,还需要精心设计的系统架构、高质量的训练数据,以及各个技术模块之间的完美协调。正如Being-0所展示的,当这些要素有机结合时,机器人就能够展现出令人惊叹的智能和能力。
对于那些对人工智能和机器人技术感兴趣的读者,Being-0系统的成功开发无疑是一个令人鼓舞的里程碑。它不仅推进了学术研究的边界,也为产业应用提供了实际可行的技术路径。随着技术的不断进步和成本的逐步降低,我们有理由相信,类似Being-0这样的智能机器人将在不久的将来走入我们的日常生活,成为我们工作和生活中不可或缺的助手。
Q&A
Q1:Being-0和普通机器人有什么区别? A:Being-0最大的区别在于它具备了类似人类的"思考"能力。普通机器人只能执行预设程序,而Being-0能够理解自然语言指令,自主制定行动计划,并在执行过程中根据环境变化灵活调整策略。它就像是一个真正会思考的机器人管家。
Q2:Being-0现在能在家庭中使用吗? A:目前Being-0还处于研究阶段,主要用于学术验证和技术展示。虽然它已经能够完成制作咖啡、取物递送等家庭任务,但要成为真正的家用产品,还需要在成本控制、安全性保障和使用便利性方面进行进一步优化。
Q3:Being-0的"三层大脑"架构有什么优势? A:这种分层架构最大的优势是各司其职、协同工作。顶层负责理解和规划,中间层负责转化和协调,底层负责具体执行。这样既保证了决策的智能性,又确保了执行的准确性和效率,避免了单一AI模型处理所有任务时可能出现的问题。


好文章,需要你的鼓励

至顶头条

科技行者

码客人生

奇客Solidot

高飞的电子替身

奇客情报站

Adobe与UCLA联手突破AI模型速度瓶颈:让图像生成快一倍的"稀疏化魔法"
Adobe研究院与UCLA合作开发的Sparse-LaViDa技术通过创新的"稀疏表示"方法,成功将AI图像生成速度提升一倍。该技术巧妙地让AI只处理必要的图像区域,使用特殊"寄存器令牌"管理其余部分,在文本到图像生成、图像编辑和数学推理等任务中实现显著加速,同时完全保持了输出质量。

不用再训练AI模型,香港科技大学团队发明"智能管家",让AI一眼就知道该抓哪里用哪里
香港科技大学团队开发出A4-Agent智能系统,无需训练即可让AI理解物品的可操作性。该系统通过"想象-思考-定位"三步法模仿人类认知过程,在多个测试中超越了需要专门训练的传统方法。这项技术为智能机器人发展提供了新思路,使其能够像人类一样举一反三地处理未见过的新物品和任务。

韩国KAIST让SVG动画脱胎换骨:AI如何破解矢量图形的"语义迷宫"让静态图标活起来
韩国KAIST开发的Vector Prism系统通过多视角观察和统计推理,解决了AI无法理解SVG图形语义结构的难题。该系统能将用户的自然语言描述自动转换为精美的矢量动画,生成的动画文件比传统视频小54倍,在多项评估中超越顶级竞争对手,为数字创意产业带来重大突破。

华为诺亚方舟实验室新突破:不加内存也能让AI变聪明的神奇方法
华为诺亚方舟实验室提出VersatileFFN创新架构,通过模仿人类双重思维模式,设计了宽度和深度两条并行通道,在不增加参数的情况下显著提升大语言模型性能。该方法将单一神经网络分割为虚拟专家并支持循环计算,实现了参数重用和自适应计算分配,为解决AI模型内存成本高、部署难的问题提供了全新思路。

Adobe与UCLA联手突破AI模型速度瓶颈:让图像生成快一倍的"稀疏化魔法"

不用再训练AI模型,香港科技大学团队发明"智能管家",让AI一眼就知道该抓哪里用哪里

韩国KAIST让SVG动画脱胎换骨:AI如何破解矢量图形的"语义迷宫"让静态图标活起来

华为诺亚方舟实验室新突破:不加内存也能让AI变聪明的神奇方法
