 微信扫一扫,关注公众号
微信扫一扫,关注公众号

科技行者

算力行者
见证连接与计算的「力量」
不用再训练AI模型,香港科技大学团队发明"智能管家",让AI一眼就知道该抓哪里用哪里
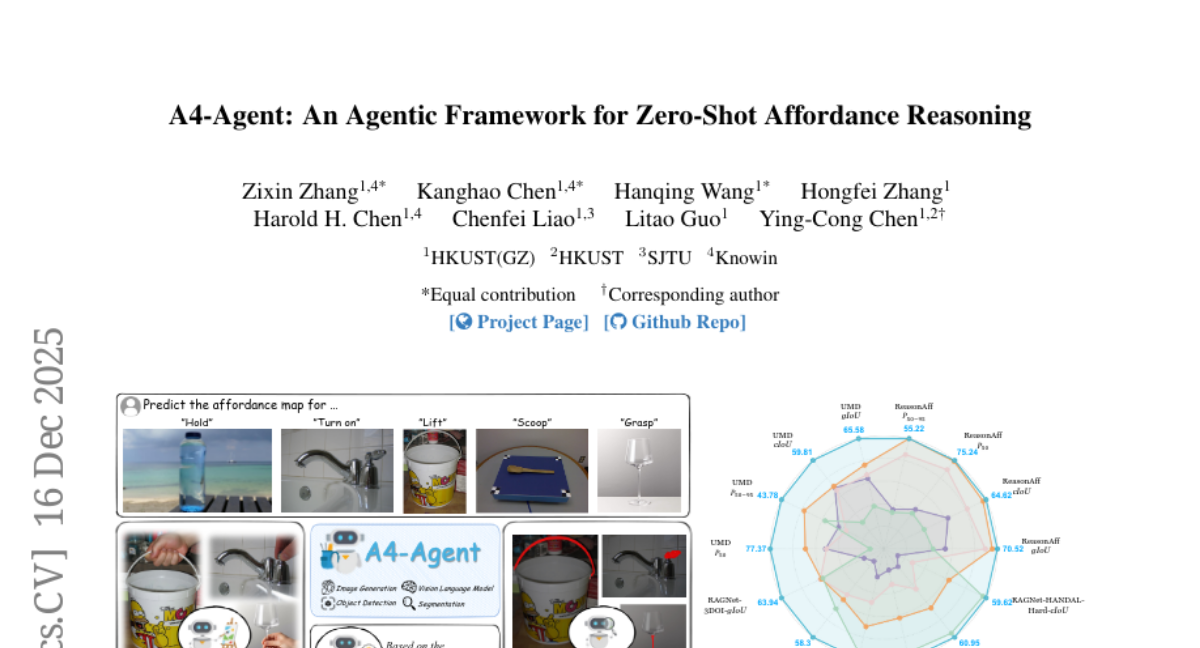
当你想让机器人帮你开冰箱门时,它应该伸手去抓门把手,而不是随便拍打冰箱表面。当你需要它帮你切菜时,它必须握住刀柄,而不是刀刃。这听起来理所当然,但对人工智能来说却是个巨大挑战。现在,香港科技大学(广州)的研究团队找到了一个巧妙的解决方案,他们开发出了一个名为A4-Agent的智能系统,这项研究成果发表于2024年12月的arXiv预印本平台,论文编号为arXiv:2512.14442v1。
在人工智能领域,让机器人理解物品的"可操作性"一直是个棘手问题。所谓可操作性,就是物品哪些部分可以用来做什么事情。比如杯子的把手用来抓握,勺子的凹面用来舀取,门把手用来开门。人类天生就懂这些,但对机器人来说,这需要复杂的推理过程。
传统的AI训练方法就像教孩子背课文一样,需要给机器人看成千上万张标注好的图片,告诉它"这是门把手,用来开门"、"这是刀柄,用来握持"。这种方法不仅费时费力,还存在一个致命缺陷:当遇到训练时没见过的新物品时,AI就像背书的学生遇到课外题目一样束手无策。
香港科技大学(广州)的张梓鑫、陈康豪、王瀚青、张宏飞等研究人员换了个思路。他们设计的A4-Agent系统就像一个经验丰富的管家,不需要事先学习每种物品的用法,而是通过"观察、思考、定位"三个步骤来理解物品的可操作性。
这套系统的工作原理很有意思。当你给它一个任务,比如"帮我拧开这个瓶盖"时,它不会直接去分析瓶子,而是先在脑海中"想象"一下这个动作应该是什么样子的。就像你在动手之前会在脑中预演一遍动作一样,A4-Agent会生成一张图像,显示手是如何握住瓶盖并旋转的。这个想象过程被研究团队称为"梦想家"环节。
接下来是"思考家"环节。系统会对比原始图像和想象出的操作图像,然后像一个经验丰富的工程师一样分析:"要完成这个任务,我需要操作瓶子的哪个部分?"通过这种对比分析,它能准确识别出瓶盖是需要操作的关键部位。
最后是"定位专家"环节。一旦确定了要操作的部位,系统会精确定位这个部位在图像中的具体位置,就像用激光笔指出目标一样准确。
这种方法的巧妙之处在于它模仿了人类的思维过程。当我们面对一个新物品时,我们也是先想象如何使用它,然后分析哪个部分最适合操作,最后精确定位。A4-Agent把这个过程分解成三个专门的模块,每个模块都使用最擅长该任务的AI技术。
实验结果令人印象深刻。研究团队在多个标准测试集上验证了A4-Agent的性能。在ReasonAff数据集上,这个零训练系统达到了70.52的gIoU得分,超越了许多需要专门训练的方法。在RAGNet数据集上,它在3DOI子集上获得了63.9的gIoU得分,在HANDAL子集上表现也相当出色。更重要的是,在UMD数据集上,A4-Agent达到了65.38的gIoU得分,比最接近的竞争对手高出15.53个百分点。
这些数字背后代表的意义很重要。gIoU是衡量AI定位准确性的指标,满分是100。A4-Agent在没有任何专门训练的情况下,就能达到60-70分的水平,这相当于一个从未学过某门课程的学生,仅凭常识就能在考试中获得良好成绩。
更令人惊喜的是,A4-Agent在面对全新场景时表现出了强大的适应能力。研究团队测试了一些日常生活中的特殊情况,比如用石头代替锤子敲钉子,用漏勺从热水中捞饺子。在这些训练数据中从未出现过的场景中,A4-Agent依然能够正确识别操作部位,展现了真正的"举一反三"能力。
为了验证想象环节的重要性,研究团队做了一个有趣的实验。他们比较了有想象功能和没有想象功能的系统性能,发现想象确实能显著提升AI的理解能力。这就像学生在解题前先画个草图会更容易理解题意一样,AI通过"想象"操作过程也能更好地理解任务需求。
研究团队还测试了系统对不同组件的依赖性。他们发现,即使用性能较弱的组件替换某些模块,整个系统仍能保持相当好的表现。这说明A4-Agent的设计非常稳健,不会因为某个环节的小问题而完全失效。
这项研究的意义不仅仅在于技术创新,更在于它展示了一种全新的AI设计理念。传统的方法试图用一个万能模型解决所有问题,就像要求一个人既是数学家又是画家还是运动员。而A4-Agent采用了分工合作的策略,让擅长想象的AI负责想象,让擅长推理的AI负责思考,让擅长定位的AI负责定位,然后将它们有机组合起来。
这种"术业有专攻"的设计思路带来了几个显著优势。首先是灵活性,当某个领域出现更强大的AI技术时,可以直接替换相应模块而不需要重新训练整个系统。其次是透明度,每个步骤的推理过程都是可见的,便于理解和调试。最后是通用性,同一套系统可以应用于各种不同的场景和任务。
从实际应用的角度来看,A4-Agent为智能机器人的发展开辟了新道路。传统的机器人需要针对每种任务进行专门训练,成本高昂且适应性差。而基于A4-Agent技术的机器人可能像人类一样,凭借常识和推理能力应对各种新情况。
这对家庭服务机器人的发展特别有意义。设想一下,一个配备了A4-Agent技术的家庭机器人,当主人说"帮我把那个杯子拿过来"时,它能够自动识别杯子的把手并正确抓取,而不需要事先学习每种杯子的抓取方式。当主人说"帮我开个罐头"时,它知道应该操作开罐器的哪个部分。
在工业应用方面,这种技术也有广阔前景。工厂里的机器人可能需要处理各种不同形状和功能的零件,传统方法需要为每种零件编写专门程序,而A4-Agent可能让机器人像熟练工人一样,凭借对工具和零件用途的理解来完成操作。
当然,这项技术目前还处于研究阶段,距离大规模实用还有一段路要走。研究团队也坦诚地指出了一些局限性,比如在极其复杂的场景中,系统的推理可能仍会出现偏差。但重要的是,A4-Agent展示了一种全新的可能性,即无需大量训练数据就能让AI具备灵活的理解和推理能力。
从更宏观的角度来看,这项研究反映了人工智能发展的一个重要趋势:从依赖大数据训练向模仿人类认知过程转变。就像人类不需要看过所有可能的物品才能理解新物品的用途一样,未来的AI可能也会具备这种举一反三的能力。
研究团队在论文中详细记录了各种实验细节和技术参数,为其他研究者提供了宝贵的参考。他们使用的核心技术包括GPT-4o作为视觉语言模型,Qwen-Image-Editing作为图像生成模型,Rex-Omni作为物体检测器,以及SAM2-Large作为分割模型。这种开放透明的研究态度有助于整个学术界的进步。
特别值得一提的是,研究团队还公布了完整的提示词模板和系统架构,这意味着其他研究者可以复现和改进这项工作。在人工智能领域,这种开放合作的精神对推动技术进步具有重要意义。
说到底,A4-Agent的成功不仅在于技术上的突破,更在于它提供了一种新的思考方式。它告诉我们,解决复杂问题不一定要用复杂的方法,有时候最有效的方案是将复杂问题分解为几个简单问题,然后用最适合的工具来解决每个问题。这种思路不仅适用于人工智能研究,对其他领域的创新也有借鉴意义。
随着这项技术的进一步发展和完善,我们有理由期待在不久的将来看到更加智能、灵活的机器人助手。它们不再是需要精确编程的机械执行者,而是能够理解、推理、适应的智能伙伴。这样的未来或许比我们想象的更近一些。对于那些希望深入了解技术细节的读者,可以通过论文编号arXiv:2512.14442v1查询完整的研究报告。
Q&A
Q1:A4-Agent和传统的AI训练方法有什么区别?
A:传统方法需要给AI看大量标注好的图片进行训练,就像让学生背课文一样。A4-Agent则采用"观察、思考、定位"三步法,不需要专门训练,而是像人类一样通过推理来理解物品用途,遇到新物品时也能举一反三。
Q2:A4-Agent的"想象"功能是怎么工作的?
A:系统会根据任务要求生成一张操作图像,比如要拧瓶盖时会想象手握住瓶盖旋转的画面。然后对比原图和想象图来分析需要操作哪个部位,这个过程模仿了人类在动手前先在脑中预演的习惯。
Q3:A4-Agent能应用到实际的机器人中吗?
A:目前还处于研究阶段,但前景很广阔。未来的家庭服务机器人可能不需要预先学习每种物品的用法,而是凭借这种推理能力来完成各种任务,比如正确抓取杯子把手、操作开罐器等。


好文章,需要你的鼓励

至顶头条

科技行者

码客人生

奇客Solidot

高飞的电子替身

奇客情报站

Snowflake AI挑战传统语言学:万千茫茫文字中,LLM真的只是"随机鹦鹉"吗?
这项由Snowflake AI Research发表的研究挑战了传统语言学对大型语言模型的批评,通过引入波兰语言学家Mańczak的理论框架,论证了LLM的成功实际上验证了"频率驱动语言"的观点。研究认为语言本质上是文本总和而非抽象系统,频率是其核心驱动力,为重新理解AI语言能力提供了新视角。

Yale大学团队推出"免费博士劳工":让AI研究助手像真人团队一样工作的革命性框架
freephdlabor是耶鲁大学团队开发的开源多智能体科研自动化框架,通过创建专业化AI研究团队替代传统单一AI助手的固化工作模式。该框架实现了动态工作流程调整、无损信息传递的工作空间机制,以及人机协作的质量控制系统,能够自主完成从研究构思到论文发表的全流程科研工作,为科研民主化和效率提升提供了革命性解决方案。

德国马普所团队发明"智能大脑重新布线"技术:让AI专家模型学会即时调整自己
德国马普智能系统研究所团队开发出专家混合模型的"即时重新布线"技术,让AI能在使用过程中动态调整专家选择策略。这种方法无需外部数据,仅通过自我分析就能优化性能,在代码生成等任务上提升显著。该技术具有即插即用特性,计算效率高,适应性强,为AI的自我进化能力提供了新思路。

聊天机器人怎么不在线聊天中"迷路"?Algoverse AI研究团队的熵值导航新突破
Algoverse AI研究团队提出ERGO系统,通过监测AI对话时的熵值变化来检测模型困惑程度,当不确定性突然升高时自动重置对话内容。该方法在五种主流AI模型的测试中平均性能提升56.6%,显著改善了多轮对话中AI容易"迷路"的问题,为构建更可靠的AI助手提供了新思路。

Snowflake AI挑战传统语言学:万千茫茫文字中,LLM真的只是"随机鹦鹉"吗?

Yale大学团队推出"免费博士劳工":让AI研究助手像真人团队一样工作的革命性框架

德国马普所团队发明"智能大脑重新布线"技术:让AI专家模型学会即时调整自己

聊天机器人怎么不在线聊天中"迷路"?Algoverse AI研究团队的熵值导航新突破
