 微信扫一扫,关注公众号
微信扫一扫,关注公众号

科技行者

算力行者
见证连接与计算的「力量」
CES2015现新奇机器人 OZOBOT游走在划线间

作者:CNET科技资讯网
2015-01-06 11:16
分享至:
Ozobot是一款小巧可爱并且还能按线路游走的创意机器人。它的好玩之处在于你可以在iPad上即兴地绘制线路,Ozobot可以即时地做出反应。机器底部的传感器非常灵敏,Ozobot甚至可以分辨线条的不同颜色,然后按照特定的线条移动。
----..---.-...-/--...-.-......./-...-....-..--../-............-.- ----..---.-...-/--...-.-......./-...-....-..--../-............-.- ----..---.-...-/--...-.-......./-...-....-..--../-............-.- ----..---.-...-/--...-.-......./-...-....-..--../-............-.-
2015-01-06 11:16 • CNET科技资讯网每年的CES消费电子展都会有各式各样新奇古怪创意的产品推出。在今年的CES上,CNET记者就在百花齐放的展台中寻觅到一款小巧可爱并且还能按线路游走的创意机器人Ozobot。它的好玩之处在于你可以在iPad上即兴地绘制线路,Ozobot可以即时地做出反应。机器底部的传感器非常灵敏,Ozobot甚至可以分辨线条的不同颜色,然后按照特定的线条移动。
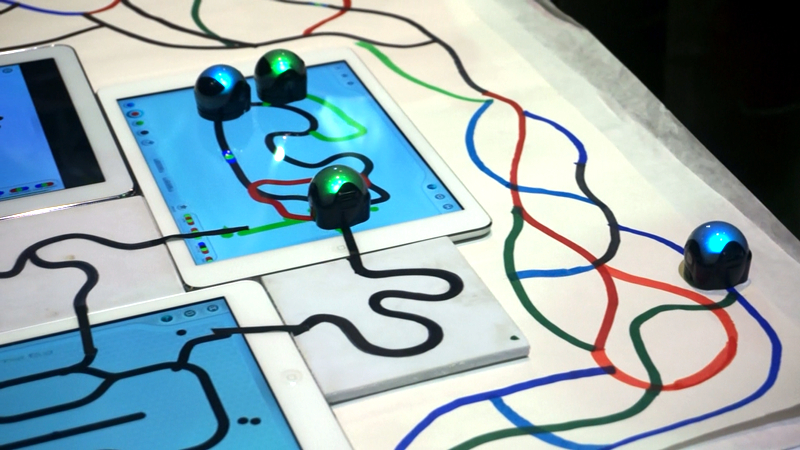
体型小巧的Ozobot像一枚大号糖果,是一只大约 25毫米大的智能机器人玩具。通过其底部的传感器装置,Ozobot可以识别1000种不同的指令。它不仅可以识别各种数字屏幕,同时可以识别不反射光的物理表面,对各种人工和数字平台上的线条、色彩作出反应。那么,这款迷你型机器人是怎样在划线间游走的呢?请点击下方视频观看:
[video]uu=dfa091e731&vu=f0871b5136&auto_play=1&width=640&height=480[/video]
分享至


好文章,需要你的鼓励

至顶头条

科技行者

码客人生

奇客Solidot

高飞的电子替身

奇客情报站

腾讯混元AI强化学习新突破:让AI学习时"先想后行",避免越学越偏
腾讯混元提出CPPO方法,通过位置权重和累积前缀预算两个机制改进AI强化学习训练,在多个Qwen3模型的数学推理任务上超越现有方法,最大提升达5.56分。

多伦多大学推出AI写作导师,帮你在Overleaf里改出一篇顶会论文
PaperMentor是多伦多大学等机构联合开发的AI论文写作导师,通过12个专业智能体和40余份专家技能文件,在Overleaf中为科研人员提供行内批注式的写作建议。

斯坦福等高校研究:AI安全"表面过关"背后,可能藏着一颗随时被引爆的"定时炸弹"
论文揭示AI安全测试的"审计缺口":模型外表安全但内部可能脆弱,并提出潜在脆弱性分数(LVS)量化内部风险。

柏林工业大学团队让AI无需"刷题"就能看懂病理切片——一种全新的"举一反三"医学图像分类方法
这项研究提出ICMIL框架,让AI通过在合成数据上预训练,无需针对新任务重新训练即可完成多示例学习分类,在十二个基准上超越需要调参的监督方法。

腾讯混元AI强化学习新突破:让AI学习时"先想后行",避免越学越偏
2026-06-17 17:36

多伦多大学推出AI写作导师,帮你在Overleaf里改出一篇顶会论文
2026-06-17 17:18

斯坦福等高校研究:AI安全"表面过关"背后,可能藏着一颗随时被引爆的"定时炸弹"
2026-06-17 17:08

柏林工业大学团队让AI无需"刷题"就能看懂病理切片——一种全新的"举一反三"医学图像分类方法
2026-06-17 16:50

----..---.-...-/--...-.-......./-...-....-..--../-............-.- ----..---.-...-/--...-.-......./-...-....-..--../-............-.- ----..---.-...-/--...-.-......./-...-....-..--../-............-.- ----..---.-...-/--...-.-......./-...-....-..--../-............-.-